Ympyrän säteen laskeminen segmentin kaaren pituuden ja jänteen pituuden perusteella
Ympyrän säteen laskemiselle segmentin kaaren ja jänteen pituuksien perusteella ei ole olemassa valmista kaavaa. Nyt kuitenkin kehitin likiarvokaavan jolla säde saadaan laskettua melkoisella tarkkuudella kyseisten parametrien avulla.
Johdanto
Idea kaavaani sain Heronin kaavasta. Siinähän kolmion pinta-ala voidaan laskea kolmion sivujen pituuksien eli kolmion piirin perusteella. Tilanne on vähän samantapainen kun koetetaan laskea ympyrän säde segmentin kaaren ja jänteen pituuksien perusteella.
Segmentin yhtälöistä joissa esiintyy säde, kaari ja jänne ei voida ratkaista sädettä ulos vaan säteen laskemiseen on käytettävä numeerisia menetelmiä, esim. suoraa iterointia tai välinpuolitusmenetelmää.
Tämän vuoksi oli perusteltua alkaa kehittelemään likiarvokaavaa jolla ongelma kierrettäisiin. Hyvällä likiarvokaavalla päästään nopeammin samaan tavoitetarkkuuteen kuin numeerisilla menetelmillä.
Lähtötilanne
Aluksi piti valita kuinka alkaisin lähestyä ongelmaa. Tarkastellaanpa ensin ympyrää ja segmenttiä:
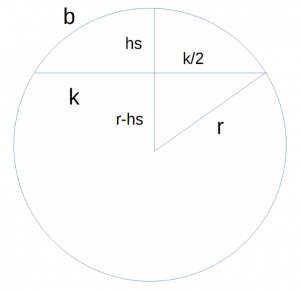
Luontevimmalta tuntui lähteä liikkeelle ympyrän säteen ($r$) yhtälöstä jossa säde voidaan ratkaista säteen ja segmentin korkeuden erotuksen ($r – h_s$) ja jänteen puolikkaan ($k$/$b$) avulla pythagoraan lauseella:
| $r=\sqrt{(r-h_s)^2+(\frac{k}{2})^2}$ |
missä $r$ on säde, $h_s$ on segmentin korkeus ja $k$ on jänteen pituus
Kun tästä ratkaistaan säde ($r$) saadaan:
| $r=\frac{h_s^2+(\frac{k}{2})^2}{2h_s}$ |
missä $r$ on säde, $h_s$ on segmentin korkeus ja $k$ on jänteen pituus
Approksimoitu suorakulmainen kolmio
Seuraavaksi täytyi määrittää segmentin korkeus ($h_s$). Päädyin käyttämään trigonometriaa ja approksimoin suorakulmaisen kolmion jossa segmentin korkeus ($h_s$) on vastainen kateetti, jänteen puolikas ($k$/2) on viereinen kateetti, kaaren puolikas ($b$/2) on hypotenuusa ja kulma on alfa ($\alpha$):
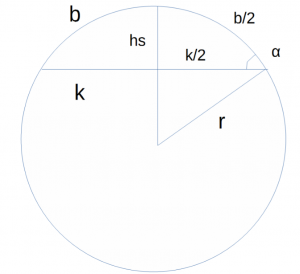
Koska viereinen kateetti ($k$/2) ja ”hypotenuusa” ($b$/2) tiedetään on kulman kosini:
| $\cos \alpha=(\frac{k/2}{b/2})$ |
missä $\alpha$ on kulma, $k$ on jänteen pituus ja $b$ on kaaren pituus
Kun tästä ratkaistaan kulma ($\alpha$) saadaan:
| $\alpha=\arccos(\frac{k}{b})$ |
missä $\alpha$ on kulma, $k$ on jänteen pituus ja $b$ on kaaren pituus
Nyt kun kulma ($\alpha$) ja viereinen kateetti ($k$/2) tiedetään voidaankin laskea segmentin korkeus ($h_s$, vastainen kateetti). Kulman tangentti on:
| $\tan \alpha = (\frac{h_s}{k/2})$ |
missä $\alpha$ on kulma, $k$ on jänteen pituus ja $b$ on kaaren pituus
Kun tästä ratkaistaan segmentin korkeus ($h_s$) saadaan:
| $h_s=\tan \alpha(\frac{k}{2})$ |
missä $h_s$ on segmentin korkeus, $\alpha$ on kulma ja $k$ on jänteen pituus
Kun kulman ($\alpha$) paikalle sijoitetaan aiemmin saatu kulman lauseke saadaan segmentin korkeuden ($h_s$) lauseke:
| $h_s=\tan(\arccos(\frac{k}{b}))(\frac{k}{2})$ |
missä $h_s$ on segmentin korkeus, $k$ on jänteen pituus ja $b$ on kaaren pituus
Nyt segmentin korkeus ($h_s$) on lausuttu kaaren pituuden ($b$) ja jänteen pituuden ($k$) avulla.
Korjausluku
Koska suorakulmainen kolmio oli approksimoitu ja kaaren pituus ($b$/2) ei vastaa todellisuudessa kolmion hypotenuusaa ei yhtälö anna tarkkoja tuloksia. Niinpä yhtälö tarvitsi jonkinlaisen korjausluvun.
Korjauslukua etsittäessäni tarkastelin segmentin todellista korkeutta (hs1) ja approksimoidusta kolmiosta saatua korkeutta (hs2) graafisessa esityksessä:
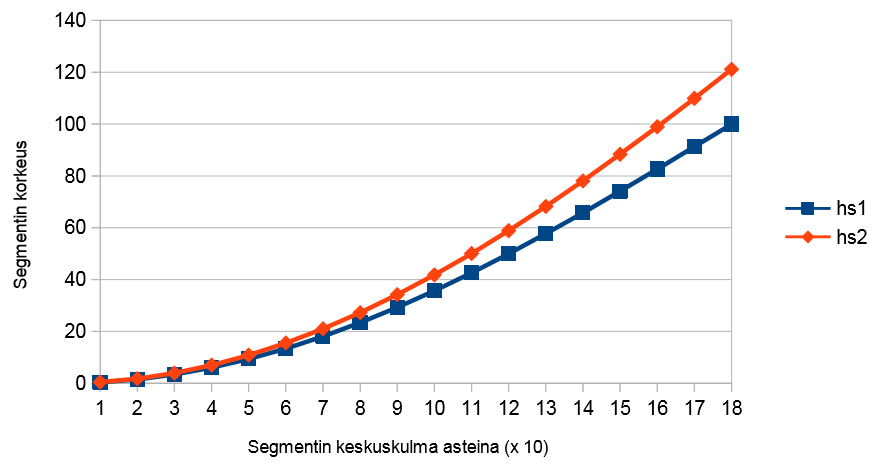
missä hs1 on segmentin todellinen korkeus ja hs2 on approksimoidusta kolmiosta saatu korkeus
Nähdään että segmentin todellinen korkeus on nouseva käyrä (tässä segmentin korkeus on laskettu segmentin keskuskulman funktiona (10 astetta, 20 astetta…)). Nyt vain arvioin kuinka approksimoidun korkeuden saisi lähestymään oikeaa korkeutta ja melko pian huomasin että helpointa on lisätä sopiva potenssi korkeuden (hs2) lausekkeen $k$/2 jakajaan:
| $h_s=\tan(\arccos(\frac{k}{b}))(\frac{k}{2^w})$ |
missä $h_s$ on segmentin korkeus, $k$ on jänteen pituus, $b$ on kaaren pituus ja $w$ on korjausluku
Yrityksen ja erehdyksen kautta sain määritettyä korjausluvun arvot. Korjausluku $w$ on 1,21868 kun kaaren pituus on puolet ympyrän piirin pituudesta tai sitä pienempi. Kun kaaren pituus on yli puolet ympyrän piirin pituudesta korjausluku $w$ on 1,5.
Lopullinen likiarvokaava
Sijoitetaan korjausluvulla varustettu segmentin approksimoitu korkeus ($h_s$) lähtötilanteen säteen ($r$) yhtälöön ja saadaan yhtälö:
| $r \approx \frac{(\tan(\arccos(\frac{k}{b}))(\frac{k}{2^w}))^2+(\frac{k}{2})^2}{2(\tan(\arccos(\frac{k}{b}))(\frac{k}{2^w}))}$ |
missä $r$ on säde, $k$ on jänteen pituus, $b$ on kaaren pituus ja $w$ on korjausluku
Tämä on nyt säteen ($r$) lopullinen likiarvoyhtälö. Yhtälö ei ole yksinkertainen mutta kuitenkin tietyllä tapaa esteettisesti tasapainoisen näköinen. Lähtökohtaisesti onkin yleensä niin että tapauksissa missä likiarvokaavaa tarvitaan on kaava yleensä sitä monimutkaisempi mitä tarkempia arvoja se antaa.
Kaavan tarkkuus
Korjausluvun ansiosta yhtälö antaa säteen $r$ arvon noin 0,7
Tällaista tarkkuutta voidaan pitää hyvänä likiarvokaavalle. Kaavan voidaan siis todeta kilpailevan iterointimenetelmien kanssa tasaväkisesti.
Loppupäätelmät
Vaikka likiarvokaava onkin tarkka on perusteltua miettiä kuinka tarpeellinen se on. Kuinka usein tulee vastaan tehtävä jossa segmentin kaaren ja jänteen pituudet tiedetään ja täytyisi niiden perusteella pystyä laskemaan muita ympyrän parametreja? Voidaan arvioida että ei kovin monesti.
Kuitenkin nyt tällainenkin on olemassa. Monestiko matematiikan historiassa on kehitelty ja löydetty menetelmiä yms. joille ei sillä hetkellä, tai myöhemminkään, ole ollut käytännön sovellusta? Aika monesti. Matematiikkaa voi ja pitääkin tutkia ja kehittää sen itsensä vuoksi. Ja lisäksi: matematiikka on hauskaa.
Kaava saakoon nimen ”Jarpin likiarvokaava”.







